.webp)
.webp)

オンロードの自動走行車(AV)は、歩行者の検知や、カットイン、合流、交差点などの状況に応じた経路計画など、いくつかのよく知られた課題に直面しています。一方、オフロードでの自動走行車には、さらなる課題があります。舗装された道路を走らないオフロードでは、走行可能な地形の検出や、でこぼこした地形への対応、さらには横転の回避などが求められます。オフロードAVをシミュレーションでテスト・検証する場合、開発チームは車両と路面の相互作用を正確にモデリングし、特にサスペンションのモデリングを行うことで、これらの課題に対処することができます。
このブログ記事では、オフロードシミュレーションのさまざまなユースケースにおいて、サスペンションモデルがどのような役割を果たすのかを説明します。その前に、このブログ記事ではまず、オフロードにおける自動運転のユースケースの2つの例と、それを可能にするシミュレーションを紹介します。
オフロード・シミュレーションのユースケース
農業
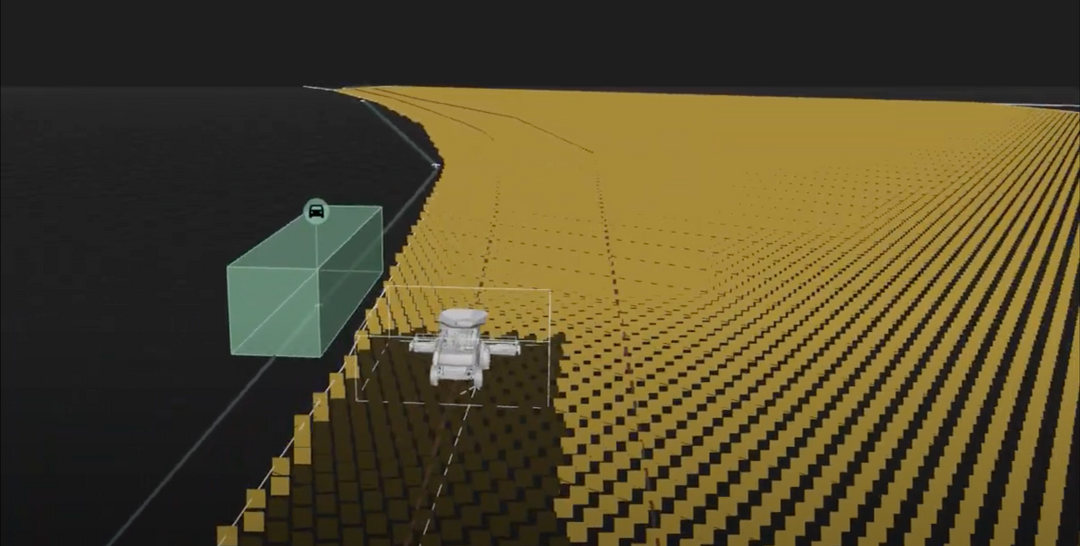
農業分野では、オートステアのような機能は10年以上前から一般的な機能でした。しかし、完全に自律した農業用車両が普及し始めています。自律型農業用車両の例としては、自律型の耕運機、コンバイン、穀物運搬車、苗の植え付け・散布機などがあります。シミュレーションは、これらのユースケース(図1)に対応した完全自律型システムの開発を支援するもので、圃場や作物の仮想モデリング、車両の仮想モデリング、認識の開発などを行います。
建設・鉱山
建設・鉱山業界では、掘削、穿孔、解体、運搬など、さまざまなユースケースで自動運転システムが使用されています。それぞれのユースケースにおいて、シミュレーションは、異なる3D環境におけるカメラ、ライダー、レーダーなどのセンサーモデルの開発とテスト、現場で人間を検知・回避するための認識アルゴリズムのトレーニング、マルチエージェントシナリオにおける予測、計画、制御のシミュレーションなどに役立ちます。
オフロードシミュレーションにおけるサスペンションモデルの重要性
オフロード車は不整地を走ることが多いため、サスペンションモデルはオフロードシミュレーションに欠かせません。サスペンションを考慮していないシミュレーションでは、現実世界を十分に反映していない結果になる可能性があります。特に、オフロード車のサスペンションのシミュレーションには、大きく分けて2種類の影響があります。
1.自動運転システムの認知性能への影響
サスペンションを正しくシミュレートできなければ、認識アルゴリズムへの影響を調べることは困難です。なぜなら、認識スタックは、自動運転システムのサスペンションによって引き起こされる追加の動きに対応するロバスト性が必要だからです。
a.ピッチとロール
オフロードAVでは、不整地走行時にサスペンションによるピッチングやローリングが発生し(図2)、車両に取り付けられたセンサーの出力に影響を与えます。車両がダイブ(前傾)すると、正面カメラは車両のすぐ前の地面しか見えなくなります。また、「スクワット」と呼ばれる後ろ向きの姿勢では、空や遠くの景色しか見えない場合があります。このようなカメラの見え方の変化は、車両の物体検出アルゴリズムの出力に影響を与える可能性があります。正面カメラは、他のアクターや物体が実際よりも近くまたは遠くにあると解釈する可能性があるからです。
b.センサーのキャリブレーション
自動運転システムのサスペンションは、様々なセンサーの表示や出力に影響を与えるため、自動運転ソフトウェアが様々な車種に搭載されるかどうかに応じて、特定のサスペンションシステムまたは様々なサスペンションシステムに対応するように、センサーを調整する必要があります。例えば、同じ自動運転ソフトウェアを使用していても、オフロード用の自動運転車であれば、異なるサスペンションシステムを使用する可能性があります。
c.アクターの行動を解釈する
AVの認識性能には、AV自身の車両のサスペンションとは別に、他のアクターの車両のサスペンションも重要です。AVの認識スタックの機械学習アルゴリズムは、アクターのサスペンションの動きに基づいて、他のアクターの行動をより正確に解釈することができます。例えば、多くの認識システムは、AVの前にいるアクターが減速していることを、アクターのピッチを観察することで学習します。もしAVが他のアクターの後ろに密着して運転していて、そのアクターが急にブレーキをかけて止まった場合(図3)、AVはアクターの前方向のピッチに基づいてこの行動をより早く検知することができます。
シミュレーションツールで正確なサスペンションモデルを作成することで、AV開発チームは、センサーの動きや出力、正しいセンサーキャリブレーションの実現、アクターの行動を正しく解釈することなど、前述の効果をすべて正確に処理できるようにAVの認識アルゴリズムを訓練することができます。
2.AVのローカライズ性能への影響
サスペンションをシミュレートすることで精度が向上すると、AVの定位性能も向上します。AVのサスペンションは車両に振動を与えるため、慣性計測ユニット(IMU)のデータにノイズが混入し、定位システムの精度を低下させます。サスペンションを組み込んだシミュレーションでは、サスペンションの振動モードがIMUデータに与える影響をシミュレートすることができるため、IMUデータからノイズを除去するフィルターを設計するためのテストベッドとなり、AVの定位精度を向上させることができます。
サスペンションモデル構築のためのアプローチ: 忠実度の違い
シミュレーションツール用のサスペンションモデルを構築するには、クォーターカー、ハーフカー、フルカー、マルチボディ、そして有限要素モデルという異なるアプローチがあります。クォーターカーのサスペンションモデルは、複雑さや忠実度が低いのが特徴ですが、有限要素モデルは最も複雑で忠実度が高いモデルです。
一見すると、サスペンションのモデルをより忠実に再現することで、より正確なシミュレーションが可能になるように思えます。しかし、必ずしもそうとは限りません。忠実度の高いモデルには、3つの重要なトレードオフがあります。1つ目は、高忠実度サスペンションモデルの特徴である多数のパラメータを推定することが困難であること。2つ目は、高忠実度モデルを実行するには、大量のコンピューティングパワーが必要なこと。3つ目は、シミュレーションツールの有用性を高めることができないタイプの忠実度です。例えば、オフロードやオンロードのAVシミュレーションにおいて、車両のピッチングやローリングの精度を確保するために、タイヤや車両のシャーシの変形を考慮する必要はありません。
Applied Intuitionの取り組み
私たちは、シミュレーションツールObject Sim*を、ピッチやロールといったサスペンションの重要な自由度を正確に捉えられるレベルで構築しましたが、モデルは可能な限りシンプルにしました。
Object Simのサスペンションモデルの一部は、私たちのチームが一から作りました。その他の部分では、オープンソースのソフトウェアを活用しました。このソフトウェアは、自動車のサスペンションを抽象的なマス・スプリング・ダンパーシステムとしてモデル化し、システムに含まれる詳細なリンケージをモデル化しません。このアプローチは性能が高く、AVのサスペンションが引き起こすピッチとロールの全体像を捉えることができます。サスペンションシステムの実際のリンクをモデル化すると、シミュレーションの速度が低下し、忠実度の点でわずかな改善しか得られません。車両のサスペンションシステム自体を設計する際にはリンクをモデル化することは有用ですが、オフロードやオンロードでのAVシミュレーションの場合には、その有用性は無視できるものです。
Applied Intuitionの車両サスペンションモデルを使用するだけでなく、開発チームは車両モデル全体をインポートして、独自のサスペンションモデルをObject Simに導入することができます。Object Simの車両サスペンションモデルについての詳細は、製品デモをリクエストしてください。
このブログで取り上げたようなAVシミュレーションの課題を解決するのが好きな方は、ぜひApplied Intuitionのエンジニアリングチームに応募してください。
*注:Object Simは以前はSimianと呼ばれていました。
