.webp)
.webp)

Applied Intuitionは今年、米国電気電子学会(IEEE)のIntelligent Vehicles (IV) Symposiumで開催されたオンライン地図検証・道路モデル作成(MaVRoC)ワークショップに参加しました。そこでは我々のチームが中心となって、自動運転に必要なオフライン地図とオンライン道路モデルの作成および検証に関する課題を共有し、共同で新しい視点を得るためのディスカッションを行いました(図1)。
多くの自動運転プログラムは、以下の様な地図作成の問題に直面していますが、地図検証はこれらの問題を軽減することができます。
- 大量のデータおよび従来のアルゴリズムと機械学習(ML)を組み合わせて使用する必要があるため、地図の作成は容易ではなく、購入する場合も高額となる。
- 地図がすぐに古くなる。実環境の変化により、自動運転用の地図を常に更新する必要がある。
- 地図開発の規模を拡大するとコストがかかる。運行設計領域(ODD)が小さく、数千マイルに留まる場合は、手作業で地図を作成することができる。しかし、このような手間のかかる作業を、数百万マイルに及ぶ全国横断的な地図にスケールアップすると、多大なコストがかかることになる。
自動運転プログラムが上記の課題に対応できる様、Applied Intuitionはワークショップにて、以下の主要トピックに焦点を当てたプレゼンテーションを行いました。
地図検証の方法
地図は測位システムの重要な構成要素であり、自動運転車両が世界のどこにいるかを把握するための目印に関する情報を事前に提供します。地図に誤りがあると、自動運転ソフトウェアの位置推定が正しく行われず、実走行テスト中の自動運転動作の解除や、最悪の場合、事故につながる可能性があります。そのため、自動運転ソフトウェアの継続的な検証、および新しいデータを受け取るたびに地図更新が必要となるため、地図作成の課題への取り組み、および軽減することが必要となります。
地図検証の方法は様々で、スピードや効果、忠実度やコストなど、それぞれに利点があります。
アルゴリズムによる地図検証
アルゴリズムによる地図検証では、地図データの正しさと完全性を検証するユニットテストを使用します。この方法は、比較的安価で素早く実行することができ、不適切なデータ整理やデータの欠落に起因するエラーを捕捉することができます。また、アルゴリズム検証を使用して、地図に存在し得る意味的関係や幾何学的な問題(例: 無効な車線幅)をチェックすることも可能です。
シミュレーションによる地図検証
シミュレーションによる地図検証では、自動運転車両、マップポイント、アクターに対して相対的に定義された、地図にとらわれないテストケースを使用します。また、地図に対するクエリにより、様々な道路の特徴を見つけ、シナリオを大規模に生成できます。この方法は、地図と自動運転システムとの間の相互作用におけるエラーを発見するのに役立ちます。
Data-in-the-loop地図検証
Data-in-the-loop地図検証(実環境データ検証)は、グランドトゥルースの地図と、自動運転車両のフリートが路上で収集した情報を比較します。この方法では、機械学習を使ってセンサーデータから特徴抽出して「軽量」な地図を作成し、この軽量な地図と実環境の間で「差分」を確認して、実環境のどこが変化したかを判断します。これらはIDベースのチェックや幾何学的な比較により可能です。実環境のデータ検証は、通常、ほとんどの変更を見つけるのに十分であり、特に大規模なフリートに対して効果的です。
Applied Intuitionの取り組み
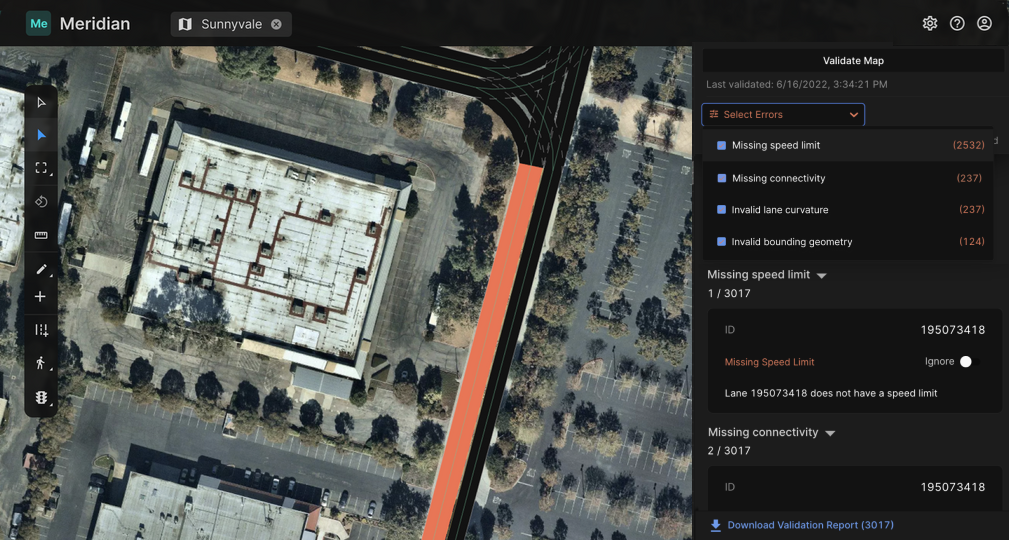
Applied Intuitionの地図編集・検証ツールMap Toolset*は、自動運転プログラムが地図を作成し、実環境で検証し、上記の手法を組み合わせて地図検証の主要課題に対処することを可能にします。Applied Intuitionのプラットフォームは幾何学的チェックと意味的関係チェックを自動化し、継続的インテグレーションと継続的デプロイメント(CI/CD)プロセスを用いてレグレッションの防止を支援します。さらに、Applied Intuitionのソリューションは様々な地図フォーマットに対応することにより、検証プロセスで見つかったエラーが真の地図エラーに関連するものであることを確認できます。(図2)
Map Toolsetの詳細と、実環境での自動運転アプリケーションのための地図の検証をどのように支援できるかについては、弊社チームにお問い合わせください。
*注:Map Toolsetは以前はMeridianと呼ばれていました。
